
Pytorch基础
Pytorch基础
- 前言
本笔记写于2025年3月底,同步于Bilibili课程 PyTorch深度学习快速入门教程(绝对通俗易懂!) 。
相关工具使用介绍
torch.utils.data.Dataset
1 | from torch.utils.data import Dataset |
在PyTorch中读取数据主要设计两个类:Dataset 和 Dataloader
-
Dataset:
-
提供一种方式去获取数据及其label
-
如何获取每一个数据及其label
-
告诉我们总共有多少的数据
-
-
Dataloader:
- 为后面的网络提供不同的数据形式
torch.utils.tensorboard
1 | from torch.utils.tensorboard import SummaryWriter # 导入SummaryWriter |
1 | # add_scalar |
1 | # add_image |
打开Tensorboard日志文件:
1 | tensorboard -logdir="logs" |
-
在 Command Prompt 中输入,注意括号中的环境名称为 pytorch 所在环境
-
多次生成 tag 相同的日志可能会出错,需要将多余的日志删除
torchvision.transforms
tensor(张量)类型
transforms如何使用,怎么转为tensor?
1 | from torch.utils.tensorboard import SummaryWriter |
为什么要用tensor类型?
- tensor中包含了很多神经网络中需要的参数
transforms中的一些工具的使用
1 | from PIL import Image |
torchvision.dataset
与 torch.utils.data 中的 Dataset 类似*(实际上是 torch.utils.data.Dataset 的一个子类)*
1 | import torchvision |
torchvision.datasets 使用方法(以CIFAR10为例)
1 | torchvision.datasets.CIFAR10(root: Union[str, Path], train: bool = True, transform: Optional[Callable] = None, target_transform: Optional[Callable] = None, download: bool = False) |
torch.utils.data.Dataloader
1 | import torchvision |
注意!Dataloader返回的imgs要用 SummaryWriter.add_images() 展示,不是add_image()
1 | torch.utils.data.DataLoader(*dataset*, *batch_size=1*, *shuffle=None*, *sampler=None*, *batch_sampler=None*, *num_workers=0*, *collate_fn=None*, *pin_memory=False*, *drop_last=False*, *timeout=0*, *worker_init_fn=None*, *multiprocessing_context=None*, *generator=None*, ***, *prefetch_factor=None*, *persistent_workers=False*, *pin_memory_device=''*, *in_order=True*) |
神经网络 torch.nn
nn == neural network
基本骨架 (Containers)
torch.nn.Module
1 | import torch |
torch.nn.Sequential
- 类似于 torchvision.transfomrs.Compose() ,能够把很多的操作结合在一起
- 让代码整洁方便
1 | import torch |
卷积层 (Convolution Layers)
卷积操作
1 | import torch |
 |
 |
 |
 |
|---|---|---|---|
| stride=1, padding=0 | stride=1, padding=2 | stride=2, padding=0 | stride=2, padding=1 |
torch.nn.Conv2d()
[官方文档](Conv2d — PyTorch 2.6 documentation)
1 | classtorch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None) |
1 | import torch |
池化层 (Pooling layers)
torch.nn.MaxPool2d()
1 | torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False) |
空洞卷积 —— kernel相互之间隔开


1 | import torch |
为什么要最大池化?
可以在保留原数据特征的情况下,大大减小数据量,提高计算速度
1 | # 对图片进行最大池化 |
最大池化后的图片,直观感受就是打了马赛克
Padding层 (Padding Layers)
就是之前讲的padding边缘填充,几乎用不到
非线性激活 (Non-linear Activations)
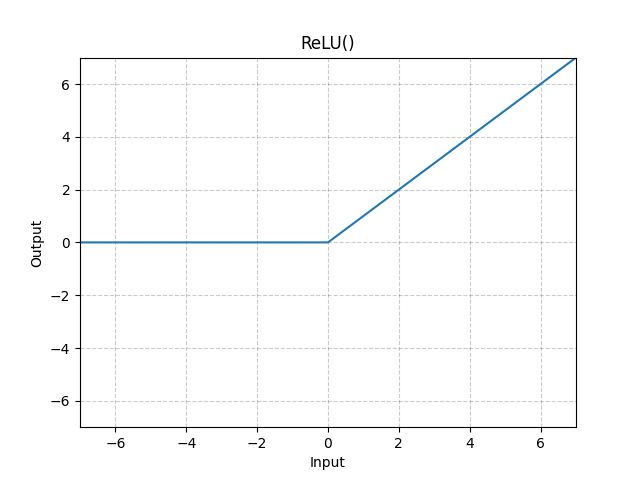
torch.nn.ReLu()
- 把输入数据负数归零,正数不变
1 | import torch |
torch.nn.Sigmoid()
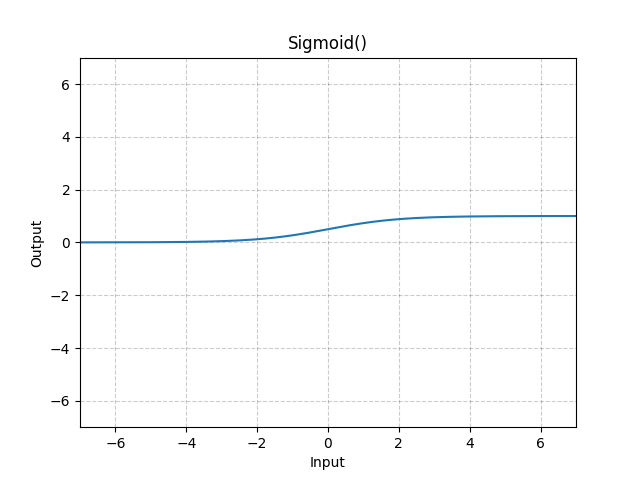
1 | from torch import nn |
几个非线性函数用法基本一致,只是函数本身公式不同
线性层 (Linear Layer)
1 | import torch |
其他不常用的层
正则化层 (Normalization Layers)
- 可以加快神经网络的训练速度
Recurrent Layers
Transformer Layers
Dropout Layers
- 随机地将输入中的某些数据置零,防止一些过拟合
Sparse Layers
- 主要用于自然语言处理
损失函数 (Loss Function)
-
作用:
-
计算实际输出和目标之间的差距
-
为我们更新输出提供一定的依据**(反向传播)**
-
torch.nn.L1Loss()
- 计算输入与目标只差的绝对值的平均值或总和
1 | import torch |
torch.nn.MSELoss()
- 计算差值平方平均数或平方和
1 | import torch |
MSELoss()中的 reduction 参数同 L1Loss()
torch.nn.CrossEntropyLoss()
CrossEntropyLoss —— 交叉熵
- 计算方法比较复杂,具体见官方文档
1 | import torch |
- 主要用于分类问题中,进行反向传播
1 | import torchvision |
优化器 (torch.optim)
1 | # ...... |
使用网络模型
现有网络模型的使用及修改
以 VGG16 为例
1 | import torch |
VGG16 网络模型最后一步是一个线性层,输入4096,输出1000,说明该模型是分类1000类的模型。
我们的 CIFAR10 数据集只有10个类别,怎样将 VGG16 应用于 CIFAR10 数据集呢?
1 | # 方法1 |
模型的保存与加载
保存
1 | import torchvision |
方式2为官方推荐,相比于方式1体积更小
加载
1 | import torchvision |
- 注意
- 加载方式必须与保存方式对应
- 老版本的Pytorch存在上述陷阱,加载时必须先import,目前版本似乎不需要了
模型训练
完整的模型训练的套路
- 在 model.py 中搭建网络
1 | import torch |
- 在 train.py 中训练网络
1 | import torch |
使用GPU进行训练
- 只有网络模型、损失函数、数据可以转到 GPU 计算,数据集、优化器等不行
- 没有GPU可以使用 Google Colab 进行训练(需科学上网)Bilibili P30
方式1 .cuda()
1 | # 网络模型 |
- 更好的写法,应在调用 .cuda 前判断是否 GPU 可用,例如:
1 | if torch.cuda.is_available(): |
方式2 .to()
1 | # 定义训练设备 |
